Kia Soul (SK3): Limitations of the system / Lane changing
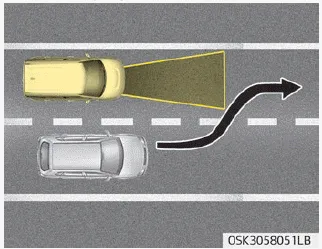
- A vehicle which moves into your lane from an adjacent lane cannot be recognized by the sensor until it is in the sensor's detection range.
- The sensor may not detect immediately when a vehicle cuts in suddenly. Always pay attention to the traffic, road and driving conditions.
- If a vehicle which moves into your lane is slower than your vehicle, your speed may decrease to maintain the distance to the vehicle ahead.
- If a vehicle which moves into your lane is faster than your vehicle, your vehicle will accelerate to the selected speed.
- Your vehicle may accelerate when a vehicle ahead of you disappears.
- When you are warned that the vehicle ahead of you is not detected, drive with caution.
During uphill or downhill driving, Smart Cruise Control system may not detect a moving vehicle in your lane, and cause your vehicle to accelerate to the set speed.
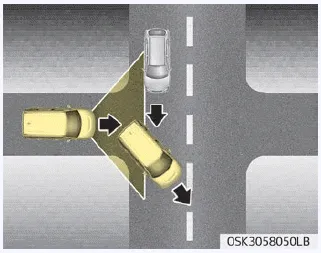
Some vehicles ahead in your lane cannot be recognized by the sensor as follows: - Narrow vehicles such as motorcycles or bicycles - Vehicles offset to one side - Slow-moving vehicles or sudden-decelerating vehicles - Stopped vehicles - Vehicles with small rear profile such as trailers with no loads A vehicle ahead cannot be recognized correctly by the sensor if any of following occurs: - When the vehicle is pointing upwards due to overloading in the trunk(tailgate) - While making turns by steering - When driving to one side of the lane - When driving on narrow lanes or on curves Adjust your vehicle speed by depressing the brake pedal according to the road condition ahead and driving condition.
Other information:
Kia Soul (SK3) 2020-2025 Owners Manual: Side repeater lamp (LED type) bulb replacement
If the side repeater lamp (LED), does not operate, have your vehicle checked by a professional workshop. Kia recommends to visit an authorized Kia dealer/service partner. The LED lamps cannot be replaced as a single unit because it is an integrated unit.
Kia Soul (SK3) 2020-2025 Owners Manual: Side repeater lamp (Bulb type) bulb replacement
1. Remove the lamp assembly from the vehicle by prying the lens and pulling the assembly out. 2. Disconnect the bulb electrical connector. 3. Separate the socket and the lens parts by turning the socket counterclockwise until the tabs on the socket align with the slots on the lens part.
Categories
- Manuals Home
- Kia Soul Owners Manual
- What to do in an emergency
- Defroster
- Battery replacement
- New on site
- Most important about car
